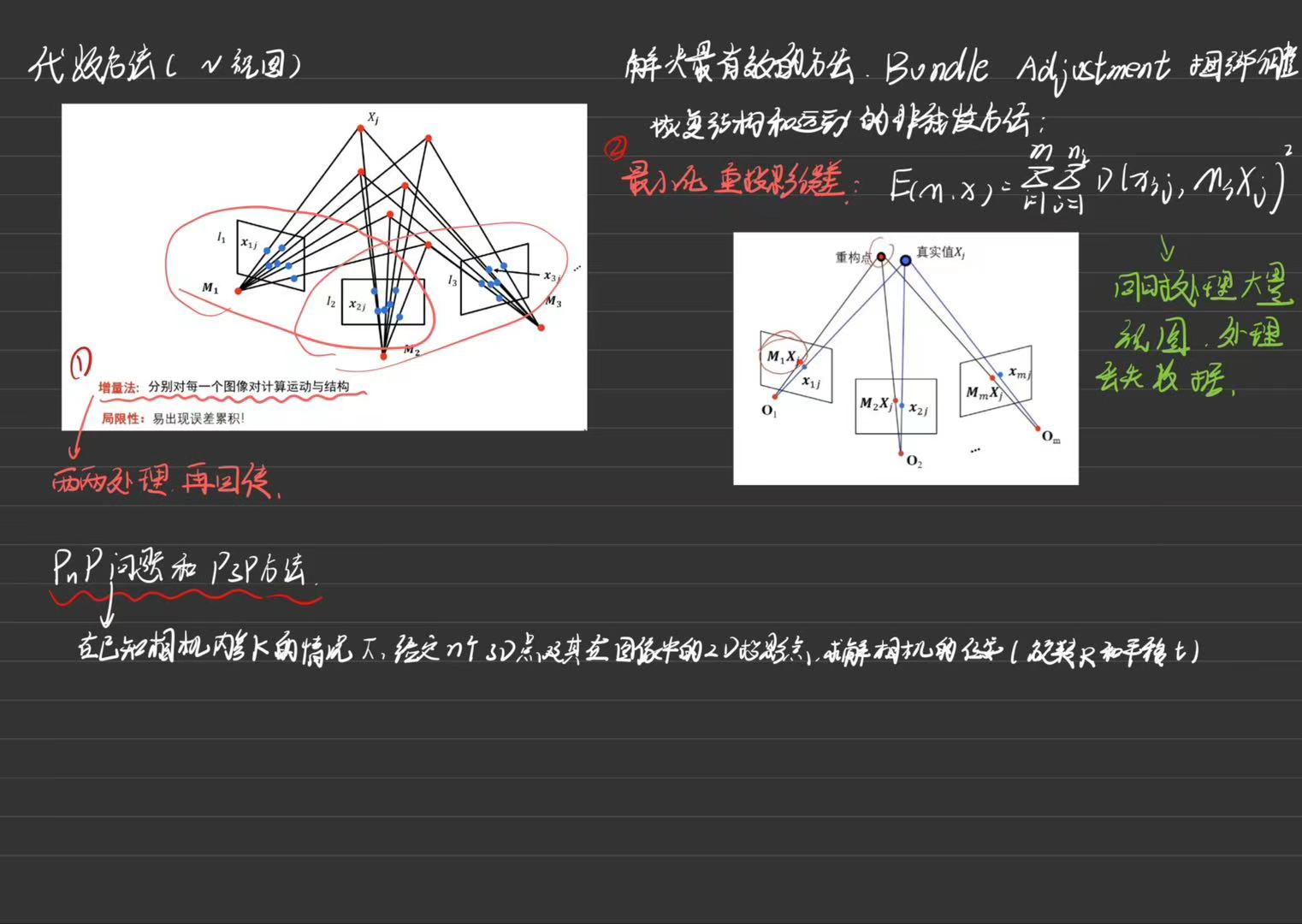
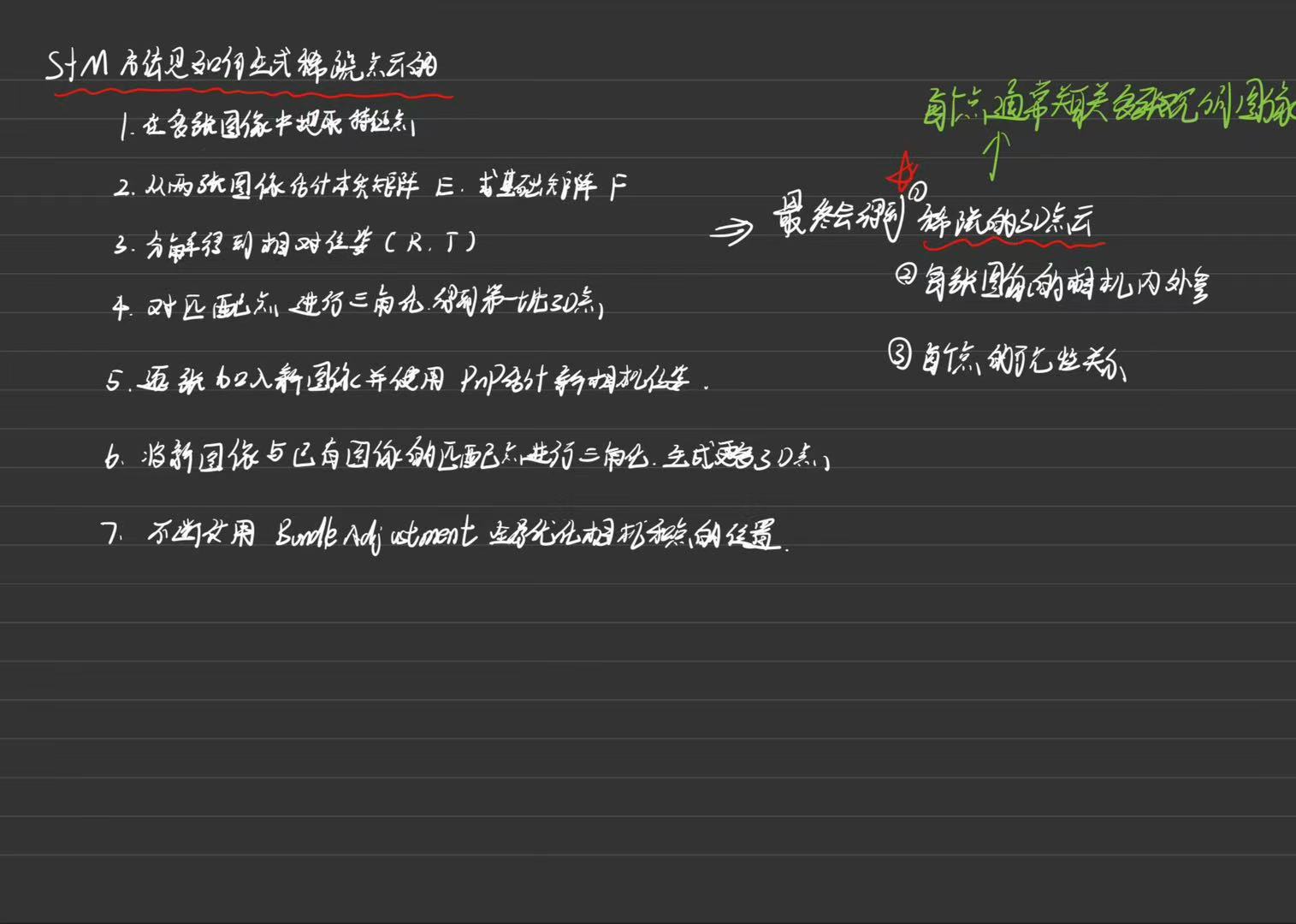
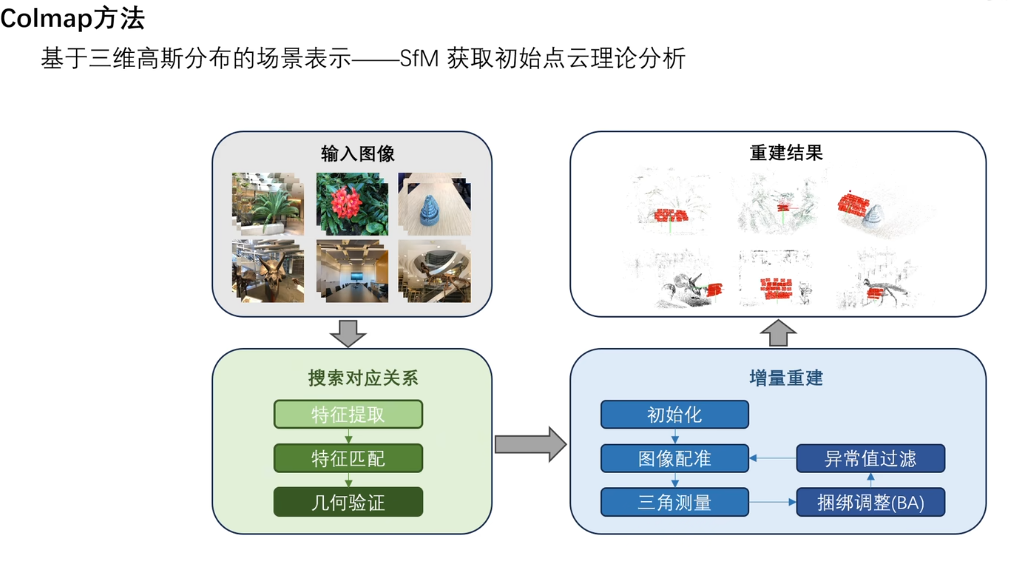
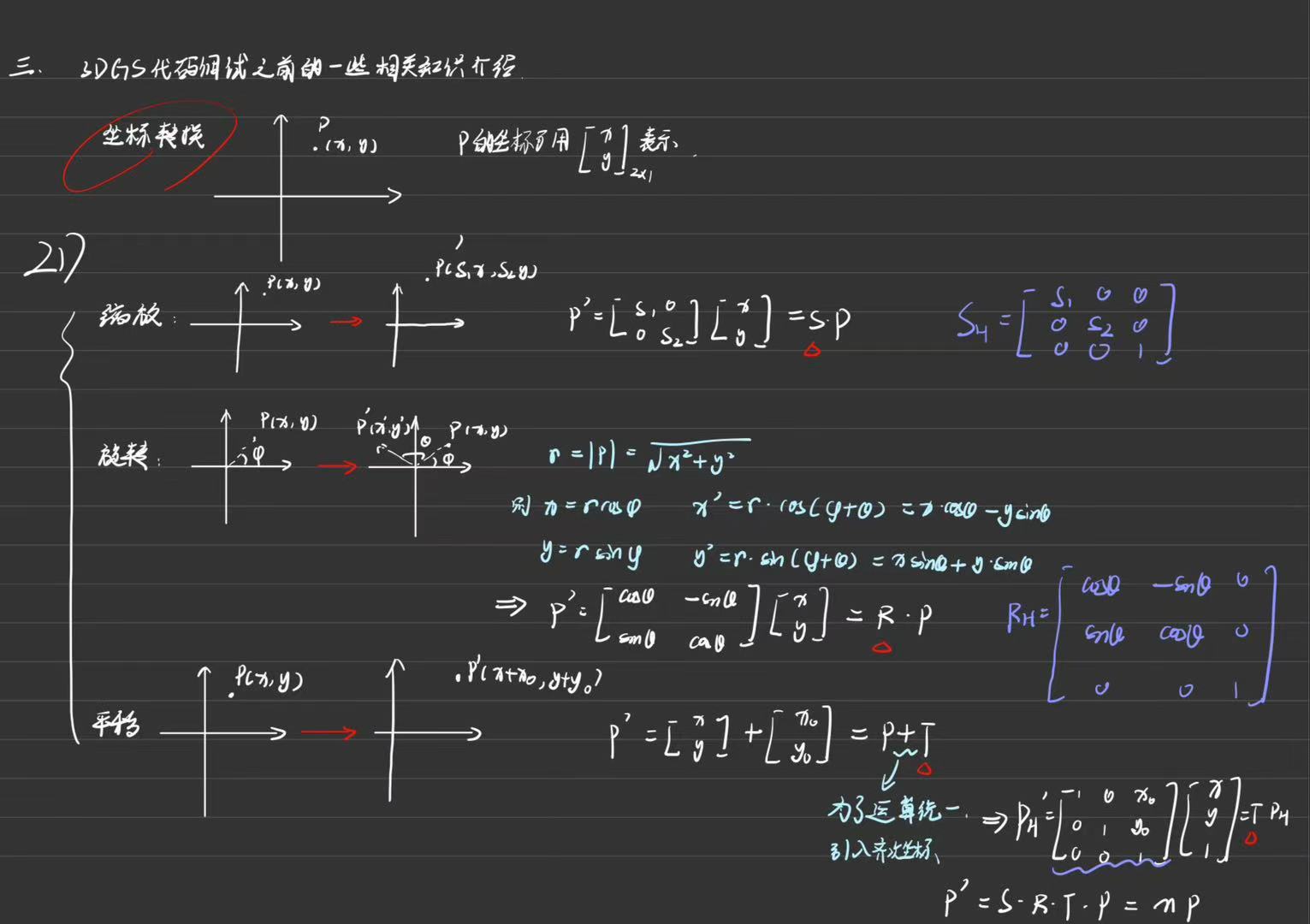
NeRF 与 3DGS 中一些常见的基本概念 Positional Encoding 位置编码 SfM (Structure from Motion 运动恢复结构) SfM 生成稀疏点云全流程 在3DGS中,SfM采用的是Colmap方法,其流程如下 3DGS 代码调试前一些相关知识 Reference三维重建入门到精通,30分钟教你学会运动恢复结构SFM 3D Gaussian Splatting代码调试之前的一些相关知识介绍(坐标变换|四元数|球谐函数) CG #笔记 NeRF 与 3DGS 中一些常见的基本概念 https://uiuiqkjn.github.io/2026/01/19/NeRF-3DGS-中一些常见的基本概念/ 作者 咕噜咕哩布 发布于 2026年1月19日 更新于 2026年3月31日 许可协议 3DGS 中投影部分公式推导 上一篇 【论文精读】3D Gaussian Splatting for Real-Time Radiance Field Rendering SIGGRAPH 2023 下一篇 Please enable JavaScript to view the comments